Encoders generate information about position, angle, and rotation counts based on motion
**Post updated August 2021**
Encoders come in two types: absolute and incremental encoders. Once they have generated information, it’s then presented in the output form of digital signals.
What are the differences?
Absolute encoders give an absolute position because of the unique code pattern assigned to each angle increment. The code pattern is used to reference a specific position to a control unit. This encoder type is generally used in transport logistics, robotics, and other applications where controlling and monitoring the exact position is important.
Incremental encoders’ position is defined by the number of pulses per rotation. Incremental encoders outputs are either a square or a sine/cosine wave and are transmitted to a control unit for each rotation. By counting the pulses with the output data, the current position can be determined. Incremental encoders are typically used in industries such as packaging, printing, conveyors and converting for speed and velocity control.
There are three different types of incremental encoder outputs. When selecting an incremental encoder, you must determine which type of output is required to be compatible with the device that will be receiving the encoder signals. Choosing the wrong output type will result in a non-functional system and possible hardware damage.
Below is a brief explanation of the three major output types for incremental encoders: TTL, HTL, Open Collector.
Immune to Noise: TTL RS422
TTL stands for Transistor Transistor Logic and is also referred to as balanced differential line driver outputs. TTL provides an RS422 output signal level, which will be +5VDC when active (on) regardless of the supply voltage level. In other words, for any input voltage, you will get the output as either 0 volts in a low state, or 5 volts in a high state.
RS422 differential outputs provide excellent noise immunity, the ability to use long cable lengths, and fast signal response. The supply voltage on most encoder models is 4.5 – 5.5VDC, or 10 – 30VDC.
Current in Both Directions: HTL Push-Pull
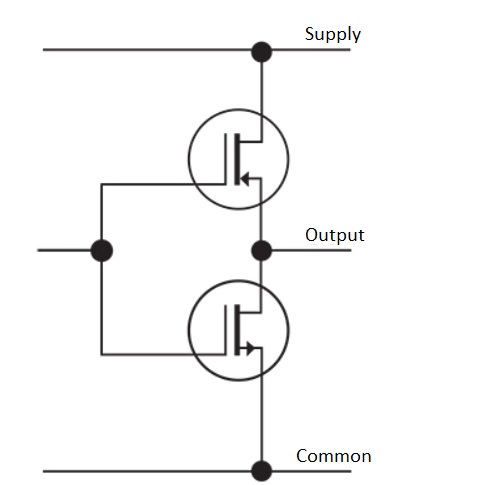
HTL stands for High Transistor Logic. This circuit uses two transistors in a Totem configuration to generate the output channels, ensuring the signal is high or low. The output voltage level equals the supply voltage when active (on). When inactive (off), the signal is pulled to supply common.
This output type is used when the motion controller, PLC, or other receiving device requires 12V or 24V level signals.
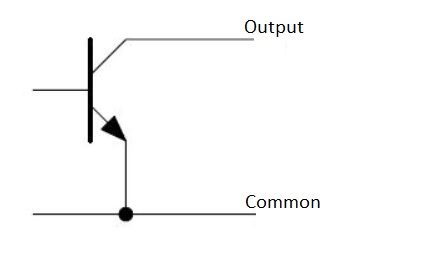
Keep it Simple: Open Collector NPN
Open Collector NPN is a sinking output with a floating signal level when the output is not activated (off). When activated (on), the signal is pulled low.
This is a simple circuit design that can be used in applications with short cable lengths.
An open collector is typically more susceptible to electrical noise than TTL or HTL.
Encoders with Programmable Outputs
SICK offers different incremental encoder options and several output options, including models with the ability to be programmed for the desired output type. This is a great advantage, allowing one encoder model to be used for multiple applications, thus reducing the number of spares required.
In addition to output type, SICK programmable encoders like the DFS60 also allow you to change pulses per revolution, counting direction, and marker attributes.
Need Help Selecting an Output Type?