


University of Minnesota students win the SICK $10K Challenge with an autonomous robot designed to improve mining safety.
Mining plays a pivotal role in powering our modern world, supplying critical minerals and rare earth elements that are essential for everything from smartphones to renewable energy. But beneath the surface, the industry carries significant risk. In 2023 alone, the Mine Safety and Health Administration reported nine fatalities among the 68,631 miners working in the U.S. That’s why Abishek Chaudhari and Sujeendra Ramesh, robotics master’s students at the University of Minnesota, set out to change the narrative. Their solution? SICK-Mine-Guard—an autonomous robot designed to navigate hazardous underground environments, detect dangers in real time, and ultimately save lives.
Autonomous mining safety: The inspiration behind SICK-Mine-Guard
“Every moment underground carries risk. But what if we could eliminate the dangers while maximizing efficiency?” said Sujeendra Ramesh, reflecting on the team’s motivation. Inspired by their advisor Ajay Kumar’s work with Boston Dynamics’ Spot robot, the duo envisioned a system that could prevent the need for rescue missions altogether.
Their research began with conversations and site visits to local mining operations, including the Coldspring granite mine. These interactions helped them understand the real-world challenges miners face—loose rock, toxic gases, and hidden hazards like flooding. “We were looking for something that can help society in a positive way,” said Abishek. “The mining industry is very risky. The workers face a lot of challenges.”
Jim DeVries, Assistant Manager of Lake Vermilion-Soudan Underground Mine State Park, emphasized the dangers: “There are three hazards we often think about in a mining situation—loose rock from the ceiling, unusual gases or bad air, and unknown hazards like water.”
What SICK-Mine-Guard does
SICK-Mine-Guard is a fully autonomous robot equipped with high-resolution 3D LiDAR sensors and cameras, enabling it to perceive its environment with both geometric depth and color. It operates independently in high-risk areas, sending real-time data to surface operators through a robust network.
The system includes a fully interactive software interface that the team named SICK Mine Viewer, which allows operators to monitor the robot, visualize 3D maps, and track critical safety metrics. Users can annotate the maps, ask questions about the environment, and receive instant, data-backed insights thanks to integrated AI-driven capabilities.
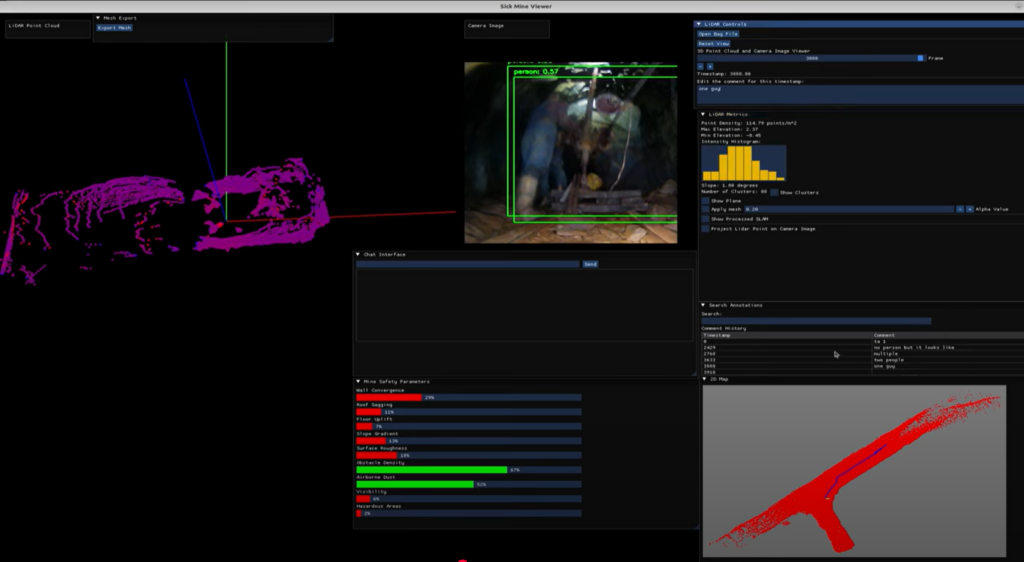
“Our system acts as a vigilant guardian,” Chaudhari explained, “It detects critical safety indicators such as wall convergence, roof sagging, and other metrics in real time…this isn’t just about navigation. It’s about preventing accidents before they happen.”
To ensure safe operation in poorly lit underground environments, the team added high-intensity LED lights to the robot, allowing it to navigate even in darkness.
The journey to developing an autonomous safety robot
Building SICK-Mine-Guard was a multidisciplinary effort. While assembling the hardware, the team simultaneously developed an AI-driven navigation algorithm that enabled the robot to detect obstacles, recognize terrain, and navigate independently.
Early testing took place in the confines of their apartment hallway—a creative workaround while waiting for permits to access real mines. “The corridor was flat and ideal for testing our software stack,” said Chaudhari, “But we knew we needed to test in a real mine eventually.”

Testing in the real world
The team tested SICK-Mine-Guard at Coldspring granite mine, where it successfully handled rocky, uneven terrain and performed precise 3D LiDAR mapping. But their most ambitious test took place 2,341 feet below the surface at the Lake Vermilion-Soudan Underground Mine State Park.

Getting permission to test at Soudan was a challenge. “It took us more than a month to get approval,” said Chaudhari. “It’s a state-owned site, and we needed special research permission. The mine was actually flooded, which added another layer of complexity.”
Despite the obstacles, the team was eventually cleared to test in the mine, and the robot performed impressively—mapping tunnels, navigating extreme conditions, and collecting real-time LiDAR data that was later analyzed for safety insights.

Overcoming obstacles
From driving four hours to test sites to simulating mining conditions in their apartment, the team faced numerous hurdles. But each challenge brought new learning opportunities.
“This was our first time working with industrial-grade LiDAR,” said Ramesh. “It was exciting to apply what we learned in class to a real-world problem.” Chaudhari added, “We learned how to use LiDAR data to develop safety metrics and understand industry demands. It showed us how diverse the applications of robotics can be.”
Impact and future potential for mining safety
The project marked the first time a University of Minnesota team participated in the SICK $10K Challenge—and they took first place. Their work not only impressed judges but also resonated with miners who saw the robot in action. “Seeing their reactions was one of our favorite parts,” the team shared. “They were very excited.”

The team also conducted a cost analysis to explore the feasibility of deploying SICK-Mine-Guard in real mining operations. With its ability to autonomously monitor safety, navigate hazardous terrain, and provide actionable insights, the robot has the potential to revolutionize underground mining.
Paving the way forward
SICK-Mine-Guard is more than a student project. It’s a vision for a safer, smarter, and more autonomous future in mining. By combining robotics, AI, and LiDAR technology, Chaudhari and Ramesh have shown what’s possible when innovation meets purpose.
“Together, we are paving the way for a safer, smarter, and more autonomous future,” they said.


