

Featuring Nick Longworth, Senior Robotics Engineer with SICK

Whether you’ve automated your bin picking applications or are still doing these tasks manually, vision-guided robots like SICK’s PLB can help solve automated bin picking challenges and can provide a number of advantages to doing these tasks manually. This state-of-the-art vision-guided robot can help you optimize your bin picking applications. See more about the latest addition to the industrial robot revolution.
When using a vision-guided robot like SICK’s PLB, many bin picking challenges are eliminated. In our video series, we discuss how SICK is contributing to the industrial robot revolution happening currently throughout the manufacturing industry. It addresses key challenges associated with automated bin picking and how you can more easily implement automated processes and be part of the industrial robot revolution.
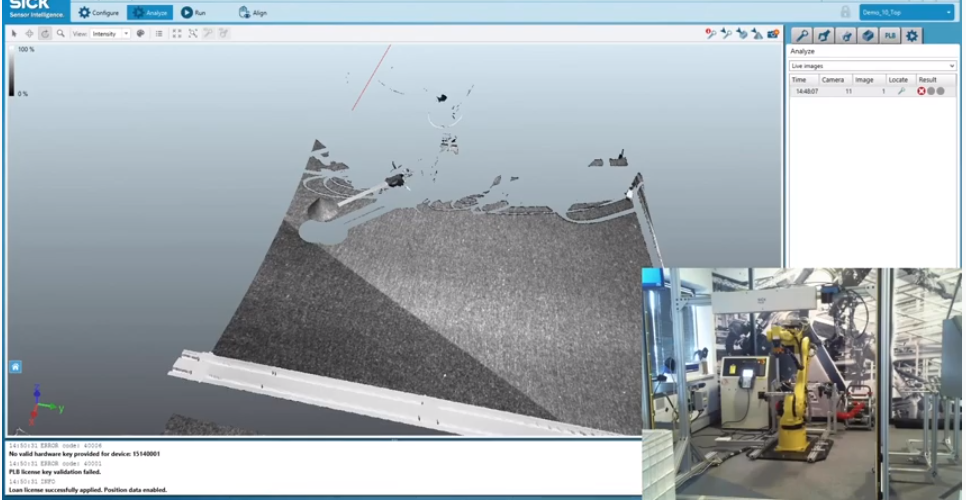
In this latest video, SICK’s robotics expert, Nick Longworth, addresses how to align the robot coordinate systems to the PLB coordinate systems. This is necessary to do because the PLB software needs to know the coordinate system that the robot is using in order to effectively communicate. Once the system knows this, it can report the absolute position that the robot should send the tool centerpoint to complete a bin picking task.
 Enter the PLB Challenge
Enter the PLB Challenge
Interested in learning more about the PLB? Wondering if it will work for your specific application? Send us a message to have your parts featured in one of our videos!


