


Sensor Solutions to Enhance Tote Picking Applications for Retailers
 Once you've identified the tote, it is then crucial to have effective methods for picking items from the totes. Various solutions are available to assist with this task, including manual and automated solutions. Objects can be uniquely identified in goods receipt for a target-actual comparison between ordered and actually incoming goods. This identification is sometimes done manually in trade and distribution centers with low throughput as well as for post-processing of shipments that cannot be processed automatically. Robot-supported bin picking enables retailers to eliminate costly and labor-intensive processes, freeing up workers to complete tasks of greater value.
Once you've identified the tote, it is then crucial to have effective methods for picking items from the totes. Various solutions are available to assist with this task, including manual and automated solutions. Objects can be uniquely identified in goods receipt for a target-actual comparison between ordered and actually incoming goods. This identification is sometimes done manually in trade and distribution centers with low throughput as well as for post-processing of shipments that cannot be processed automatically. Robot-supported bin picking enables retailers to eliminate costly and labor-intensive processes, freeing up workers to complete tasks of greater value.
In this five part blog post series, we’re highlighting five applications for intelligent sensor solutions that contribute to a fast, efficient, and economical supply chain in a series of blog post. In the fourth blog post, we discuss tote picking solutions.
Image-Based Code Readers and Code Identification

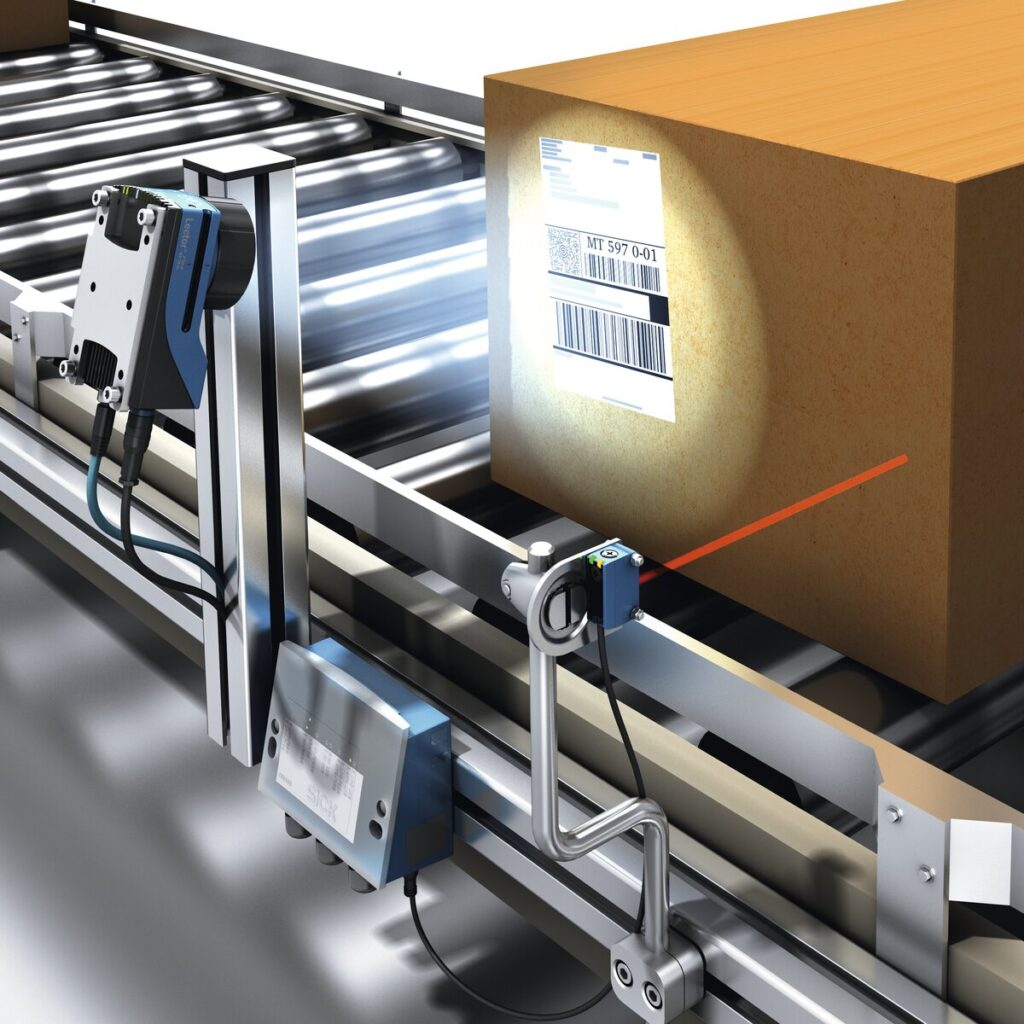
The main goals behind the design for any efficient tote picking station is the improvement of ergonomics and increase in efficiency. By installing Lector63x image-based code readers over the workstation, these goals are reliably met. With the camera's large reading range and depth of field, it enables objects to be identified through automatic reading of bar codes when objects are being recorded. Unlike mobile handheld scanners, this code reader allows employees to have both hands free at all times.
In distribution centers with low throughput and post-processing of shipments that cannot be processed automatically, identification between ordered and actually incoming goods is done manually. Depending on the application requirements, corded or cord-free IDM26x mobile hand-held scanners are used to read the 1D or 2D codes attached to the objects.
Robot Guidance for Tote Picking
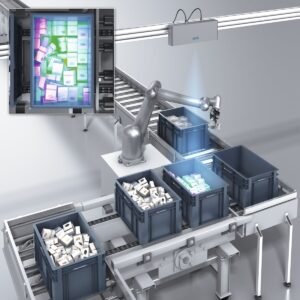 For tote picking sensor solutions that don’t need human hands, SICK offers two solutions. The first is the PLB robot guidance system, which is equipped flexibly with different 3D cameras. The PLB ensures reliable robot operation by combining several localization algorithms, such as collision avoidance and overload detection. Flexible functions for robot integration enable the use of the system in countless robot models.
For tote picking sensor solutions that don’t need human hands, SICK offers two solutions. The first is the PLB robot guidance system, which is equipped flexibly with different 3D cameras. The PLB ensures reliable robot operation by combining several localization algorithms, such as collision avoidance and overload detection. Flexible functions for robot integration enable the use of the system in countless robot models.
Robot guidance and orientation can be facilitated by the short response time of the Visionary-S CX 3D vision sensor. The sensor provides depth accuracy and the color detection enables reliable identification of challenging contents. It can identify numerous products in one tote or objects of the same size, which are only differentiated by color without difficulty.
Want to learn more about tote picking solutions? Contact a SICK representative today! And don’t miss the next article in this blog series where we discuss packaging and pallet handling solutions.


