


How the Robo-Replicator creates an affordable machine vision alternative
With the rise of Industry 4.0, LiDAR sensors exhibit enormous potential in manufacturing. Current machine vision sensors have the limitation of being stationary, requiring multiple sensors to scan different angles of an object. In addition, light pollution around the sensor can interfere with recorded values. The cumulative result is manufacturing solutions that are limited to one product type, which greatly hampers efficiency.
This team of students from Clover Park Technical College in Lakewood, Washington aimed to address this problem with their project, the Robo-Replicator, for SICK's TiM$10K Challenge. The team included Jesse Moore, Austin Tomadsu, and Todd Ritchie. They were advised by Jason Sawatzki, a Mechatronics Instructor at Clover Park’s School of Advanced Manufacturing. This team won Best Video submission for the TiM$10K Challenge.
So, what is the TiM$10K Challenge? In this challenge, SICK reached out to universities across the nation that were looking to support innovation and student achievement in automation and technology. Participating teams were supplied with a SICK 270° LiDAR, a TiM, and accessories. They were challenged to solve a problem, create a solution, and bring a new application that utilizes the SICK scanner in any industry.
The Problem: Expensive Machine Vision
Moore was looking for an opportunity to work with high-end sensors. When Sawatzki approached him about the TiM$10k Challenge, he was ecstatic. He quickly convinced Ritchie, who was interested in working with the design of robotics equipment, and Tomasdu, who wanted to challenge himself with a project beyond the college curriculum. They found a solution for a more affordable alternative to using 2D machine vision on robot arms.
As worldwide companies move to implement Industry 4.0 processes, machine vision has been instrumental in automating processes and data collection that was previously difficult. Machine vision has become increasingly relied upon as the standard, and while it has earned its place, there is always room for a more affordable alternative.
Chief among these problems in 2D vision are inconsistent lighting conditions and edge detection. It is easy for a camera to miscalculate the correct data points on a surface. Up to now, this major problem in vision has been treated with an increase in cameras and computational processing power.
“For companies on a budget, this can get expensive quickly,” Tomasdu said. “LiDAR is the better option because it works in virtually any lighting condition, and is more affordable.”
LiDAR is also able to distinguish object contours that would otherwise dupe machine vision edge detection. LiDAR is computationally sparse, offering affordability for users and ease of use.
| Typical Application | Hardware Costs | Lighting and Isolation Costs | Integration Costs | Total Costs |
| 2D Vision | $6K-$10k | $2K-$5K | $10K-20K | $18K-$35K |
| 2D LiDAR | $3K | $0 | $9K | $12K |
The Solution: The Robo Replicator
The Robo Replicator is a robotic arm whose primary function is to transfer analyzed data into a foam block at its base. This allows it to be a useful tool in the speedy completion of manufacturing tasks. How does it do it? With a SICK TiM781 2D LiDAR!
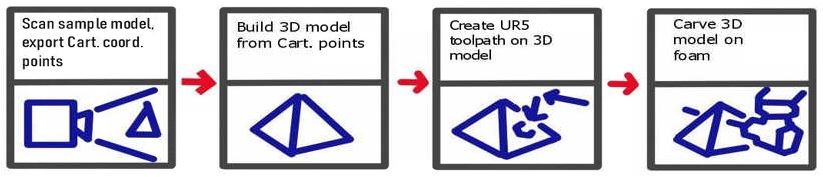
The SICK LiDAR, located at the end of the robot arm, accurately scans objects. It then translates them onto a digital plane, where the data points can be further analyzed. From there, a 3D model is rendered into the software. The Robo Replicator arm then transfers the model onto a foam block. The aim of this process is to alleviate humans from repetitive actions by providing the robot with instructions which it can carry out quickly and efficiently.
“None of us had programmed a robot before, so YouTube helped a lot,” Moor said. “We were able to develop an algorithm that would take the incoming data from the LiDAR and statistically process it, which reduced noise and increased measurement accuracy significantly.” This algorithm is available for review on Github.
Instead of sinking money into machine vision, the Robo-Replicator allows companies to utilize LiDAR in four different applications:
- Raw material forming: A router can be used on the robotic arm to carve a using LiDAR data. This allows improvements in rapid prototyping from non-digitized models.
- Production line: Much like the raw material forming, the LiDAR will scan the layout of fastener holes on an original piece. The arm will then drill new holes in another piece of material. This can be done without regard to the orientation of the parts.
- Food industry: As an example, LiDAR can be used to scan a pizza in a factory and accurately place the proper proportion of ingredients. This allows for consistency and saves money for food and beverage manufacturers.
- Painting of consumer products: With the scan of a sample product, such as a wooden toy, the robot can use it as a base model in the built-in software. Point cloud data can direct the robot on where to apply paint in specific areas.
Find out more about the intricacies of the Robo-Replicator in this video the team put together:
Challenges in the Robo-Replicator’s Development
“Our project was an entire series of small roadblocks,” Ritchie said. “Luckily, most of the problems we experienced with the sensor were fixed with documentation.”
Aside for these minor problem, the main hindrance the team experienced was COVID-19, as many of us can relate. Moore, Ritchie, and Tomasdu were slightly ahead of schedule with their project. In fact, they had just finished wrapping up a week before the school shut, and about two weeks before the TiM$10K Challenge deadline. The team had planned on using their last two weeks to refine their project further and even add extra features to the Robo-Replicator, but their time was cut short.
“COVID taught us a big lesson- and it’s good advice for future contestants,“ Jesse said. “Run this like a job for a client. Plan for unexpected events!”
Register for the 2020-2021 TiM$10K Challenge
![]() SICK is now accepting entries for the TiM$10K Challenge for the 2020-2021 school year! Student teams can register online by September 14, 2020. Student teams are encouraged to use their creativity and technical knowledge to incorporate the SICK LiDAR for any industry in any application. Advisors/professors are allowed to guide the student teams as required.
SICK is now accepting entries for the TiM$10K Challenge for the 2020-2021 school year! Student teams can register online by September 14, 2020. Student teams are encouraged to use their creativity and technical knowledge to incorporate the SICK LiDAR for any industry in any application. Advisors/professors are allowed to guide the student teams as required.
This contest was supported by PMMI Foundation’s U Skills Fund. PMMI Foundation works to grow awareness of careers in packaging and processing, providing assistance to schools and programs that develop students to excel in the industry.


