


TiM$10K Challenge team from Michigan Technological University designed an automated robot to assist servers in restaurants
Four students from Michigan Technological University participated in SICK’s TiM$10K Challenge for the 2020-2021 school year. Travis Momsen, Alex Langerak, Jared Smith, and Adam Misch created a robot for the service industry with an ability to map out a room, view its surroundings, and avoid any collisions.
The team wanted to tackle an industry where workers are put under a lot of stress. There are times when a restaurant is understaffed or extremely busy, making it difficult to get orders out to tables. This upsets not only servers and managers, but also customers when they must wait long periods of time to receive their food. With the robot’s mapping algorithm, a user can program different locations that they want to robot to travel to, making it ideal for delivering food in the service industry.
Servotron is composed of a SICK TiM781 LiDAR sensor, a Kobuki Turtlebot robot, a JeVois Smart Machine Vision camera, and a Raspberry Pi 3b. The team also used the open-source code from SICK to be able to do the coding for Servotron in Robot Operating Systems (ROS).
“None of us had coded in ROS before. Unlike any other coding languages, there was a steep learning curve, but thankfully there are lots of open-source code for examples. Jared was able to put his coding prowess to work to be able to learn this new language,” Momsen said.
Choosing to target the service industry was a decision the team made when they decided it would be a more relevant market than their initial autonomous vacuum idea. The process of starting the project began with understanding each piece of technology.
“We worked with our camera, LiDAR, robot, and Raspberry Pi separately so we could understand each element by itself before trying to put it all together. Once we had done that, it was a lot of testing the code bit by bit,” Momsen said.
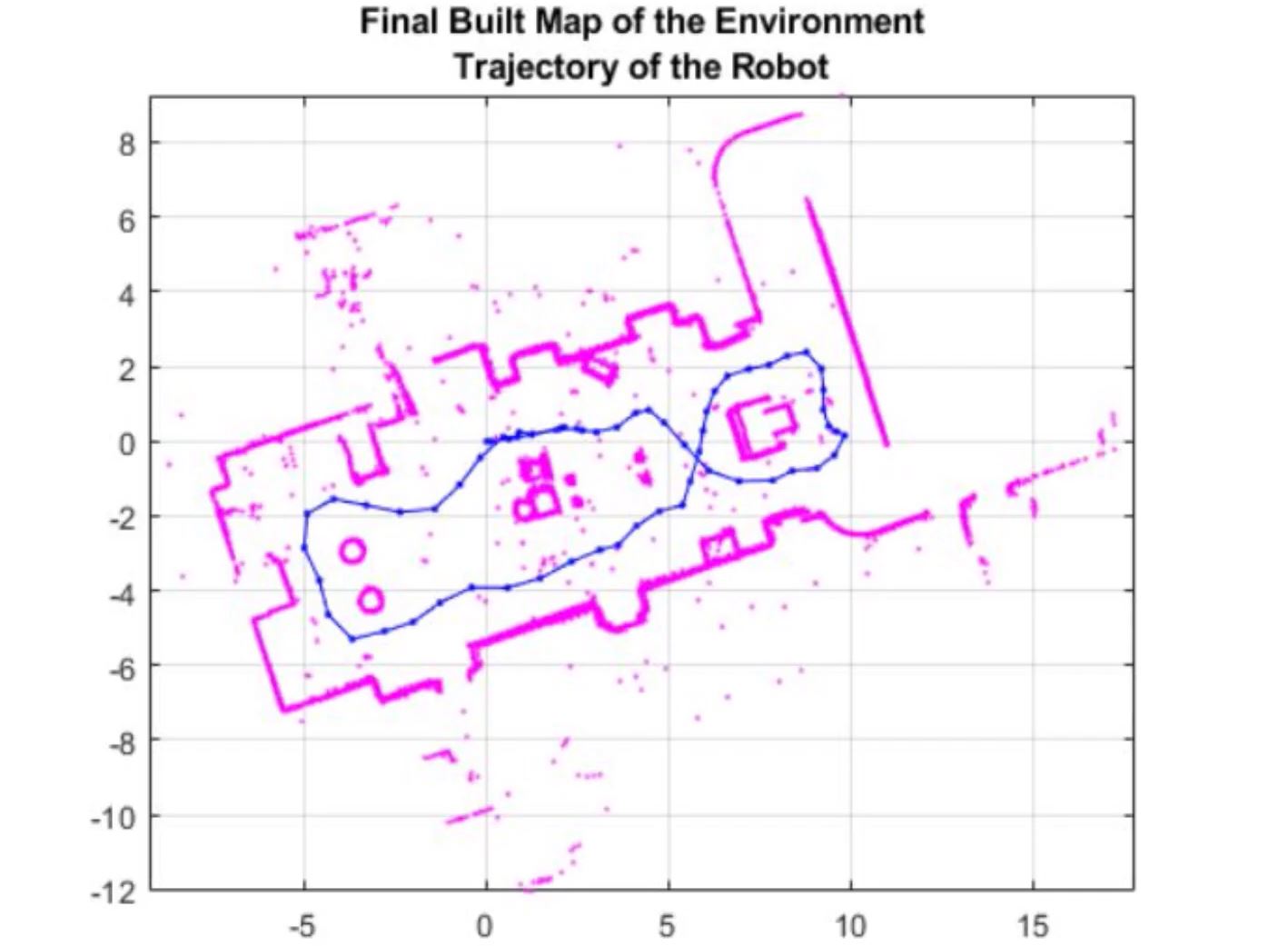 The robot’s job is to transport its load to a specified location and the LiDAR technology is responsible for reading the robot’s surroundings. For example, if the table arrangement was changed, the robot would still be able to navigate around the restaurant and drop off food with no collisions. Bumpers were also installed on the robot, so if it were to malfunction and collide with something it could reorient itself and clear the object.
The robot’s job is to transport its load to a specified location and the LiDAR technology is responsible for reading the robot’s surroundings. For example, if the table arrangement was changed, the robot would still be able to navigate around the restaurant and drop off food with no collisions. Bumpers were also installed on the robot, so if it were to malfunction and collide with something it could reorient itself and clear the object.
A simulation called Gazebo allowed the team to work together and test their technology when the University was shut down due to the pandemic. They were able to simulate an environment with their robot and a built in LiDAR sensor. Being able to use this virtual program made the transition of coming back to the lab more efficient.
“We met every week with just our team members, and then every other week with our advisor to update him on our progress. Our meetings were almost always held over Google Hangouts, although we met in person in our lab once or twice,” Momsen said.
Another application of ServoTron that could be beneficial is when people have guests at their house. For example, if you’re hosting a party or gathering, you can enjoy yourself by putting ServoTron to work and avoid having to carry out hors d'oeuvres and drinks for others. An improvement to the technology that the team suggested was adding a compartment with heating or cooling to accommodate for necessary temperatures of certain foods.
Alleviating server’s stress on busy nights in the service industry is beneficial to the servers themselves and customers, and the automated service system this team from Michigan Tech created has the ability to do exactly that.
This contest was supported by PMMI Foundation’s U Skills Fund. PMMI Foundation works to grow awareness of careers in packaging and processing, providing assistance to schools and programs that develop students to excel in the industry.


